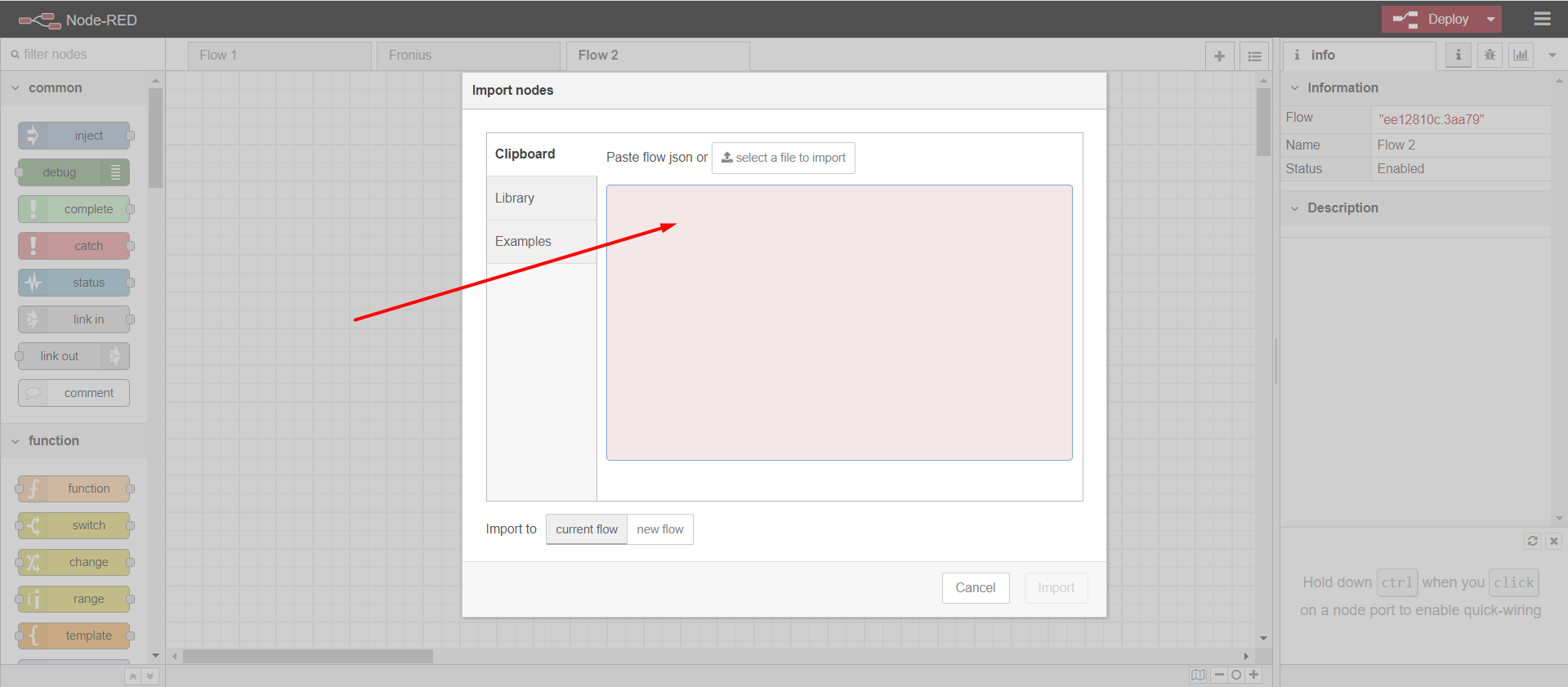
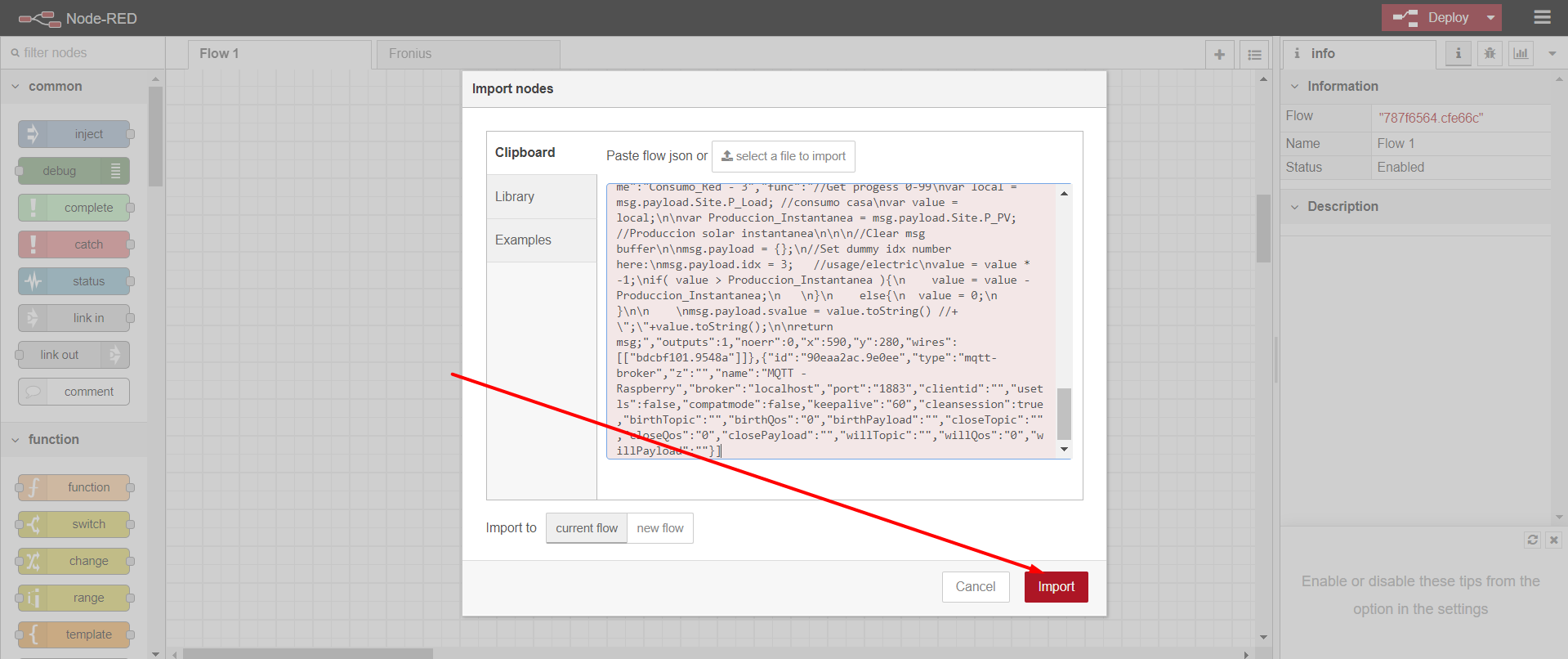
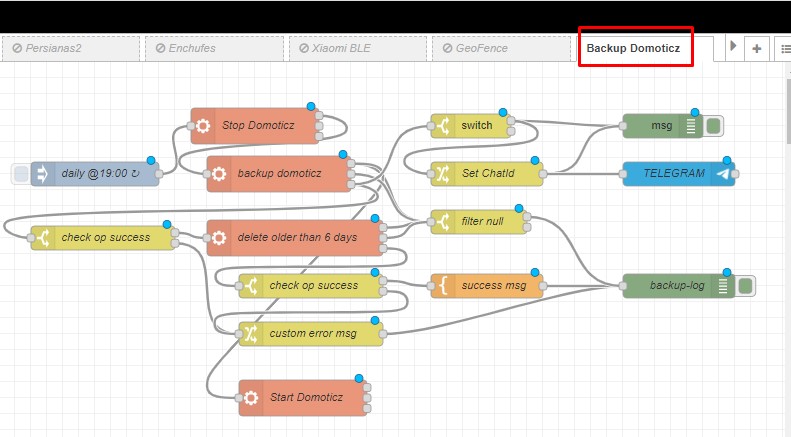
Introducimos en el recuadro siguiente texto (lo copiamos con control +c) y lo pegamos en el recuadro (con control + v):
[{"id":"373a68e9.e25388","type":"tab","label":"Backup Domoticz","disabled":false,"info":""},{"id":"2bb80e81.191132","type":"exec","z":"373a68e9.e25388","command":"sudo tar -zcf Domoticz.tgz --exclude='/home/pi/domoticz/backups' /home/pi/domoticz/ ","addpay":false,"append":"","useSpawn":"false","timer":"","oldrc":false,"name":"backup domoticz","x":390,"y":160,"wires":[["667a8324.28831c","61e35d5d.a263a4"],["667a8324.28831c"],["6ecdb629.af58a8","8f568c99.ab8fd"]]},{"id":"2c200eb7.43f932","type":"inject","z":"373a68e9.e25388","name":"daily @19:00","topic":"","payload":"","payloadType":"date","repeat":"","crontab":"05 20 * * 1,5","once":false,"onceDelay":0.1,"x":160,"y":160,"wires":[["3ec06a25.bedd66"]]},{"id":"5e7df84f.42ca98","type":"debug","z":"373a68e9.e25388","name":"backup-log","active":true,"tosidebar":true,"console":false,"tostatus":false,"complete":"payload","x":890,"y":300,"wires":[]},{"id":"6ecdb629.af58a8","type":"switch","z":"373a68e9.e25388","name":"check op success","property":"payload.code","propertyType":"msg","rules":[{"t":"eq","v":"0","vt":"num"},{"t":"else"}],"checkall":"true","repair":false,"outputs":2,"x":170,"y":240,"wires":[["79fa5e93.1a17"],["60787cef.3ec724"]]},{"id":"79fa5e93.1a17","type":"exec","z":"373a68e9.e25388","command":"sudo find /home/pi/Domoticz.tgz -mtime +6 -type f -delete","addpay":false,"append":"","useSpawn":"false","timer":"","oldrc":false,"name":"delete older than 6 days","x":410,"y":240,"wires":[["667a8324.28831c"],["667a8324.28831c"],["96b21f1e.c9b15"]]},{"id":"60787cef.3ec724","type":"change","z":"373a68e9.e25388","name":"custom error msg","rules":[{"t":"set","p":"payload","pt":"msg","to":"There was an error in backup flow. Check logs.","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":430,"y":360,"wires":[["5e7df84f.42ca98"]]},{"id":"96b21f1e.c9b15","type":"switch","z":"373a68e9.e25388","name":"check op success","property":"payload.code","propertyType":"msg","rules":[{"t":"eq","v":"0","vt":"num"},{"t":"else"}],"checkall":"true","repair":false,"outputs":2,"x":430,"y":300,"wires":[["610f9930.29f398"],["60787cef.3ec724"]]},{"id":"610f9930.29f398","type":"template","z":"373a68e9.e25388","name":"success msg","field":"payload","fieldType":"msg","format":"handlebars","syntax":"mustache","template":"Backup complete.","output":"str","x":650,"y":300,"wires":[["5e7df84f.42ca98"]]},{"id":"667a8324.28831c","type":"switch","z":"373a68e9.e25388","name":"filter null","property":"payload","propertyType":"msg","rules":[{"t":"nnull"},{"t":"else"}],"checkall":"true","repair":false,"outputs":2,"x":640,"y":220,"wires":[["5e7df84f.42ca98"],[]]},{"id":"a5b11d45.e258b","type":"debug","z":"373a68e9.e25388","name":"","active":true,"tosidebar":true,"console":false,"tostatus":false,"complete":"true","targetType":"full","x":870,"y":100,"wires":[]},{"id":"8f568c99.ab8fd","type":"switch","z":"373a68e9.e25388","name":"","property":"payload.code","propertyType":"msg","rules":[{"t":"eq","v":"0","vt":"str"},{"t":"neq","v":"0","vt":"str"}],"checkall":"true","repair":false,"outputs":2,"x":630,"y":100,"wires":[["a5b11d45.e258b","dd1fc1f0.136b"],[]]},{"id":"dd1fc1f0.136b","type":"change","z":"373a68e9.e25388","name":"Set ChatId","rules":[{"t":"set","p":"payload.chatId","pt":"msg","to":"xxxxxxxxxxxx","tot":"str"},{"t":"set","p":"payload.type","pt":"msg","to":"document","tot":"str"},{"t":"set","p":"payload.content","pt":"msg","to":"/home/pi/Domoticz.tgz","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":650,"y":160,"wires":[["a5b11d45.e258b","f1a17347.de8cd"]]},{"id":"f1a17347.de8cd","type":"telegram sender","z":"373a68e9.e25388","name":"TELEGRAM","bot":"5ca03714.2e38f8","haserroroutput":false,"outputs":1,"x":890,"y":160,"wires":[[]]},{"id":"3ec06a25.bedd66","type":"exec","z":"373a68e9.e25388","command":"sudo systemctl stop domoticz","addpay":false,"append":"","useSpawn":"false","timer":"","oldrc":false,"name":"Stop Domoticz","x":360,"y":100,"wires":[["2bb80e81.191132"],[],[]]},{"id":"61e35d5d.a263a4","type":"exec","z":"373a68e9.e25388","command":"sudo systemctl start domoticz","addpay":false,"append":"","useSpawn":"false","timer":"","oldrc":false,"name":"Start Domoticz","x":420,"y":440,"wires":[[],[],[]]},{"id":"5ca03714.2e38f8","type":"telegram bot","z":"","botname":"xxxxxxx_bot","usernames":"","chatids":"","baseapiurl":"","updatemode":"polling","pollinterval":"300","usesocks":false,"sockshost":"","socksport":"6667","socksusername":"anonymous","sockspassword":"","bothost":"","botpath":"","localbotport":"8443","publicbotport":"8443","privatekey":"","certificate":"","useselfsignedcertificate":false,"sslterminated":false,"verboselogging":false}]